Researchers from Skoltech and KU Leuven have developed a gynecological training simulator with tactile feedback for in-office hysteroscopy. This outpatient diagnostic procedure involves examining the inside of the uterus with an endoscope, which is introduced through the cervix without or with local anesthesia and without any other medical instruments. Presented in IEEE Transactions on Medical Robotics and Bionics, the solution is intended to close the gap in gynecologist training that prevents this minimally invasive procedure from being used more widely where in-patient hysteroscopy is not necessary.
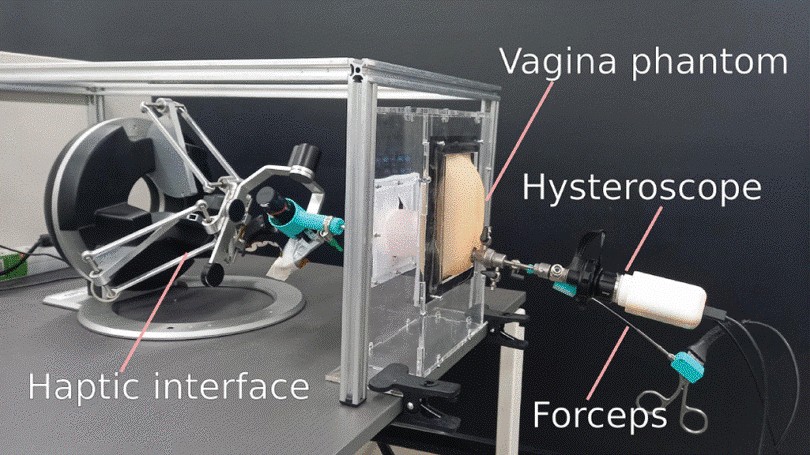
Image. Training simulator for gynecologists that enables practicing in-office hysteroscopy. The haptic interface is there to provide tactile feedback during the exercise in addition to the simulated image from the hysteroscope camera transmitted to the computer screen (not seen in the photo) for the trainee to see. Credit: Vladimir Poliakov et al./IEEE Transactions on Medical Robotics and Bionics
In-office hysteroscopy is a medical procedure for diagnosing intrauterine pathologies and sometimes doing minor operations, such as polyp removal, by inserting a thin tube called a hysteroscope through the vagina and cervix. Any hysteroscope carries a camera and thicker ones can accommodate a tool for minor surgical manipulations inside the hollow tube. If done right, this outpatient variety causes less discomfort and inconvenience than doing the procedure in the operating room in a hospital under general anesthesia with cervical canal dilation and possibly other manipulations with the uterus.
“Despite a number of clear advantages for the patient, hysteroscopy in an in-patient setting poses serious challenges to the medical professional,” the study’s lead author, Skoltech PhD student Vladimir Poliakov, commented. “The gynecologist has to monitor the level of patient discomfort in real time, carefully guiding the endoscope through the vaginal canal and — which is particularly difficult — the undilated cervix with its narrow and curved anatomy, all of this without the use of a speculum or other additional instruments.”
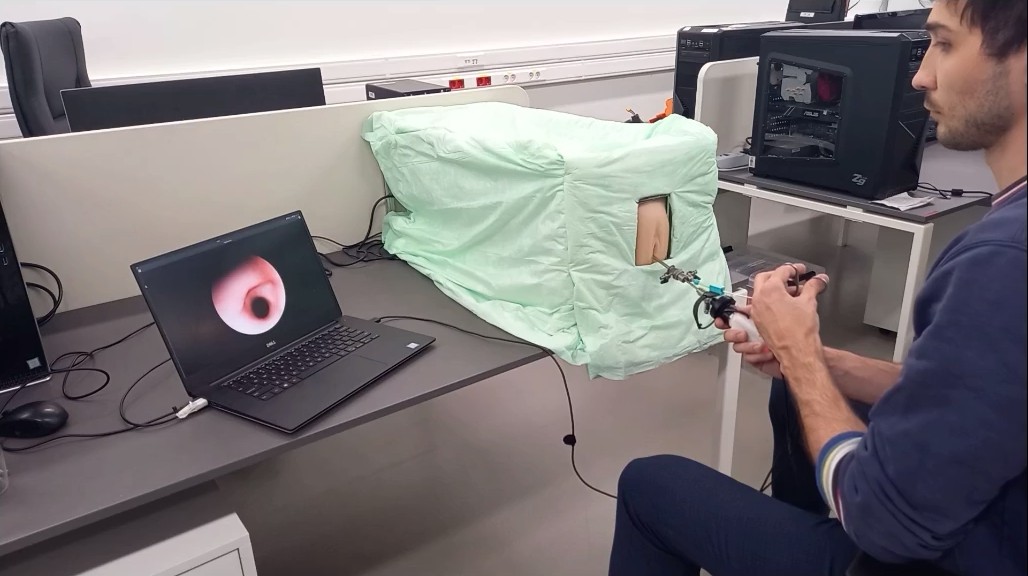
Image. A trainee completing an in-office hysteroscopy exercise that involves passing the cervical canal with an endoscope and collecting points in the uterine cavity with a built-in forceps. Credit: Vladimir Poliakov et al./IEEE Transactions on Medical Robotics and Bionics
In the absence of adequate training platforms for exercising the skills required in this professionally demanding procedure, clinics tend to favor in-patient hysteroscopy, because it is easier to perform and there are available training systems for it. That means patients have to settle for the more invasive operation at a hospital instead of a quick appointment with the gynecologist, even where it could be avoided.
“By proposing our simulator, my colleagues and I seek to fill this vacuum in training experience and ultimately minimize invasivity and patient discomfort,” Poliakov went on. “As far as we know, our first prototype has no commercially available analogues with haptic [tactile] feedback.”
In designing the training system, the researchers were guided by the results of a poll they conducted among practicing hysteroscopists, who pointed to the importance of feedback and highlighted the crucial aspects of the procedure — and hence the simulator’s essential degrees of freedom.
The training system consists of a silicone mock vagina and a set of hysteroscopic tools: The trainee inserts the endoscope with one hand and controls the built-in forceps with the other. The exercise involves finding and collecting points scattered around the uterine cavity in the simulation. This enables the student to work on passing through the cervical canal, which is arguably the most important skill involved, while also exercising coordinated manipulations with two hands. The opposite end of the practice hysteroscope is connected to a haptic interface, Force Dimension’s high-precision Omega.7 robot, which provides tactile feedback. A computer displays the visual input from the endoscope camera, generating the image in real time based on a simulation of the tool’s interaction with the virtual uterus model.
The team validated its training system on 17 test subjects allocated to three groups based on their prior experience with hysteroscopy: beginners, intermediate-level practitioners, and experts. The subjects’ scores in the exercise proved sufficient for classifying them with relative reliability into the three proficiency groups initially outlined. “What’s more, we saw the scores for five out of six indicators improve among the beginners after five attempts. This leads us to conclude that the device has potential for cultivating the skills necessary for in-office hysteroscopy.”
The head of the Skoltech Laboratory of Intelligent Space Robotics, Associate Professor Dzmitry Tsetserukou from the Center for Digital Engineering, who co-authored the study, added: “Cervicoscopy and hysteroscopy are essential methods for diagnosing the reproductive system of women. They are widely used in modern clinics, such as Hadassah Medical Moscow, an Israeli health center in Skolkovo. However, there are currently no modern training systems available on the market that would provide a realistic experience of working with the instrument. We managed not just to reproduce the visual feedback in a lifelike manner but also to ensure that the trainee has a tactile perception of passing through the cervical canal with a hysteroscope. Our solution has a lot of potential for commercialization on the European and Russian market, and clinics are showing much interest toward the technology. Much credit for the success of this project is due to KU Leuven Professor Emmanuel Vander Poorten, who is among Europe’s leading experts on medical robots.”
Contact information:
Skoltech Communications
+7 (495) 280 14 81
